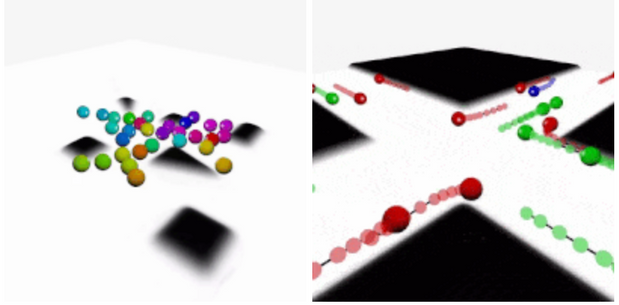
A new purely distributed technique based on Gaussian Belief Propagation for multi-robot planning problems, formulated by a generic factor graph defining dynamics and collision constraints over a forward time window.
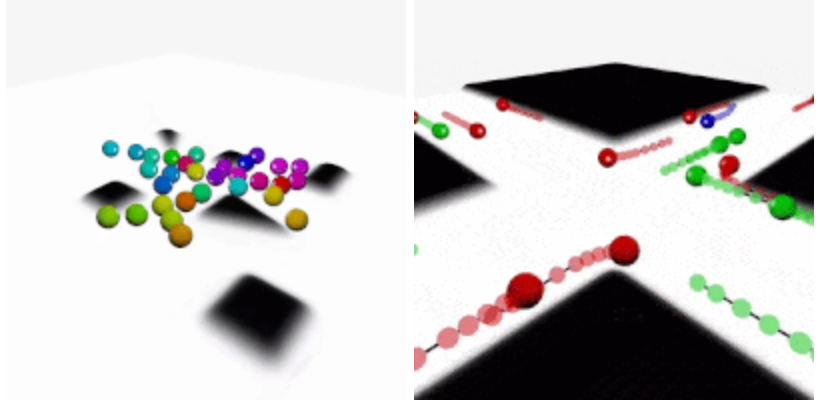
Precise coordinated planning over a forward time window enables safe and highly efficient motion when many robots must work together in tight spaces, but this would normally require centralised control of all devices which is difficult to scale. We demonstrate GBP Planning, a new purely distributed technique based on Gaussian Belief Propagation for multi-robot planning problems, formulated by a generic factor graph defining dynamics and collision constraints over a forward time window. In simulations, we show that our method allows high performance collaborative planning where robots are able to cross each other in busy, intricate scenarios. They maintain shorter, quicker and smoother trajectories than alternative distributed planning techniques even in cases of communication failure.
Aalok Patwardhan, Riku Murai, Andrew J. Davison. The GBP Planner || Distributing Collaborative Multi-Robot Planning with Gaussian Belief Propagation. RA-L 2023, ICRA 2023
The GBPplanner software is available through the link on the right and is free to be used for non-commercial purposes. Full terms and conditions which govern its use are detailed in the source code package.
News 2018-2024












Contact us
Dyson Robotics Lab at Imperial
William Penney Building
Imperial College London
South Kensington Campus
London
SW7 2AZ
Telephone: +44 (0)20 7594-7756
Email: iosifina.pournara@imperial.ac.uk